Starting from my studies as a mechanical engineer, I developed a strong interest in artificial intelligence, more precisely machine learning. I am particularly interested in the topic of Deep Reinforcement Learning. Besides theoretical topics of reinforcement learning like new algorithms or problems like artificial curiosity, I am also interested in the application of robotic and autonomous systems like self-driving cars. Therefore i taught myself programming parallel to my studies and completed several online courses like:
- Artificial Intelligence Nanodegree at Udacity (2020)
- Deep Reinforcement Learning Nanodegree at Udacity (2019)
- Self-Driving Car Engineer Nanodegree at Udacity (2018)
I was also able to do an internship for my master's degree as a machine learning engineer at ABB. Here I mainly worked on a project for automated stacking and reclaiming of an open cast mine by using reinforcement learning. Subsequently, I managed to write my master's thesis at ZF with the topic: "Optimization of the adaptive control of a damper system/chassis system through fast-learning deep reinforcement learning algorithms".
Recent Work
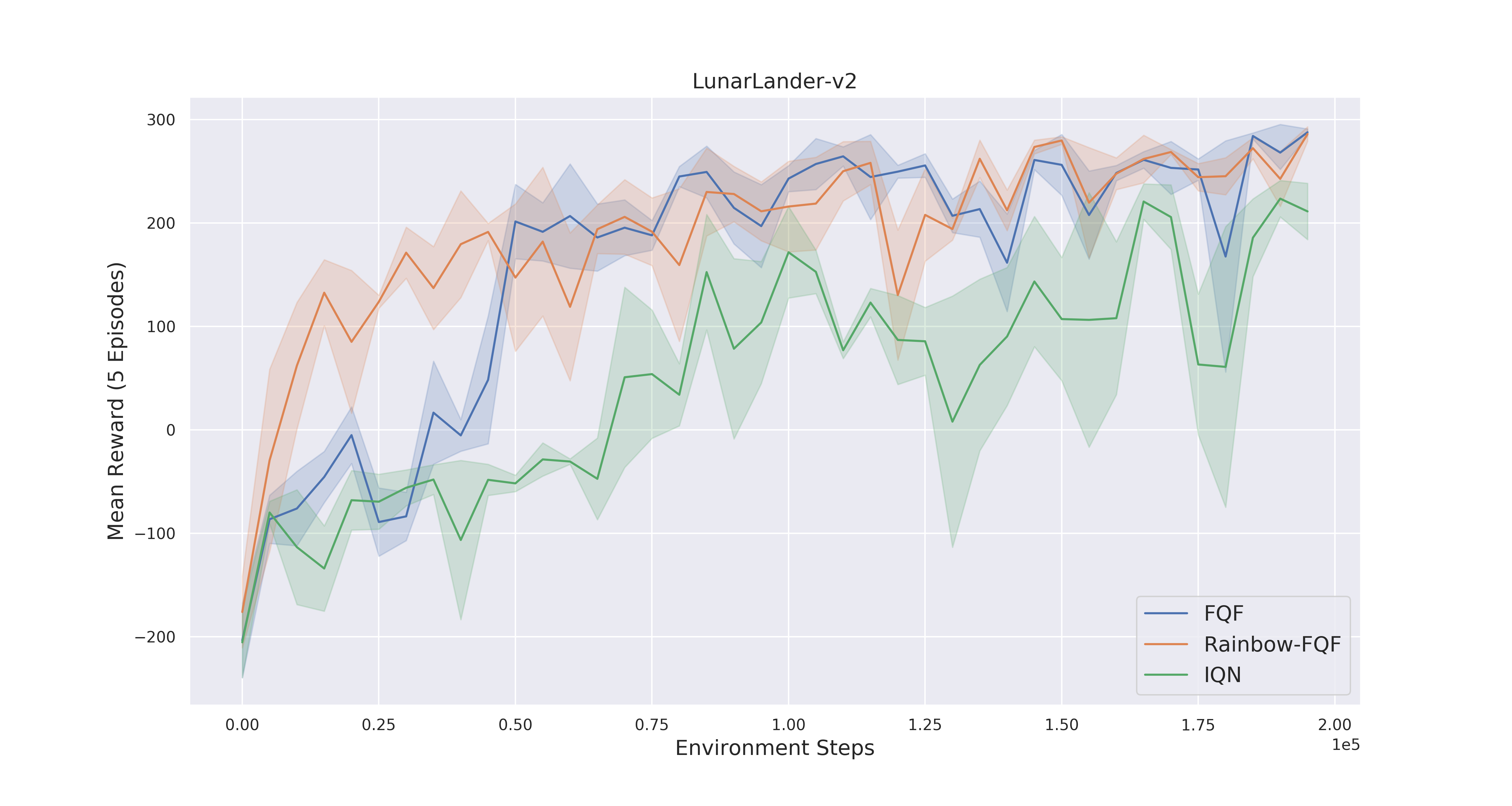
Fully Parameterized Quantile Function (FQF) and Extensions
Implementation of the state-of-the-art distributional RL algorithm FQF including the extensions PER, Noisy Layer, Dueling Networks, and Munchausen RL. Supporting parallel environments for faster training (wall clock time).

Soft Actor Critic and Extensions
Implementation of the state-of-the-art algorithm Soft Actor Critic including extensions like PER and ERE.
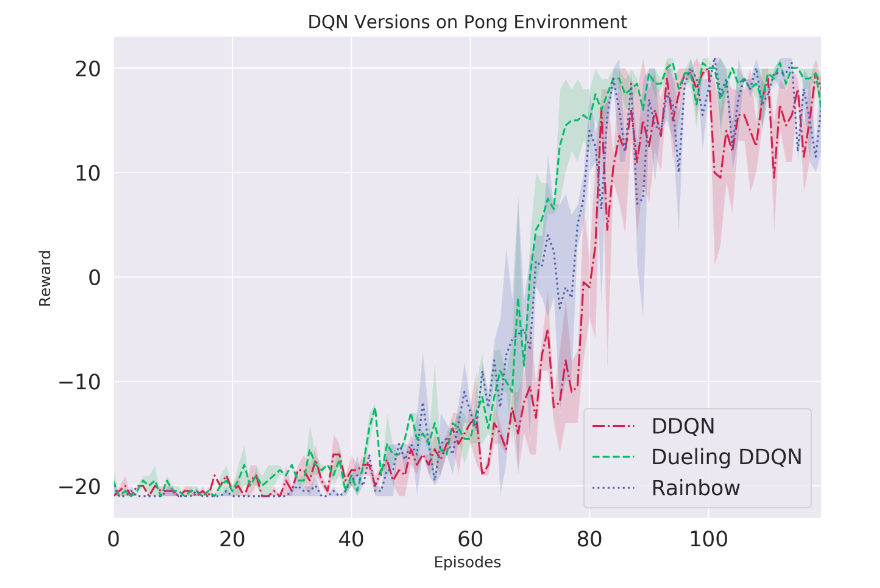
DQN Atari Agents
Modularized implementation of the DQN algorithm and all extensions up to Rainbow DQN.
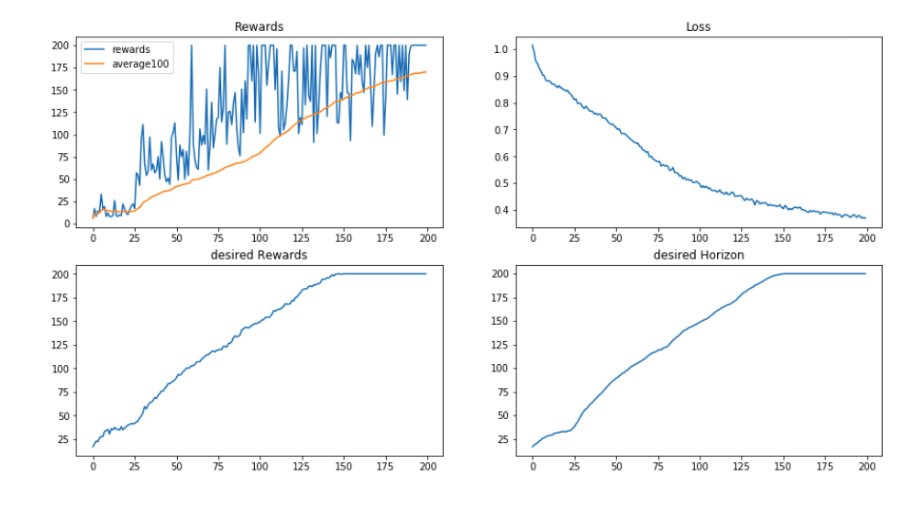
Upside-Down-Reinforcement-Learning
Paper implementation of the algorithm Reinforcement Learning Upside Down by Jürgen Schmidhuber.

Deep-Reinforcement-Learning-Algorithm-Collection
Collection of implemented DRL algorithm, including PPO, PPO2, A2C, DDPG, TD3, curiosity driven exploration etc.
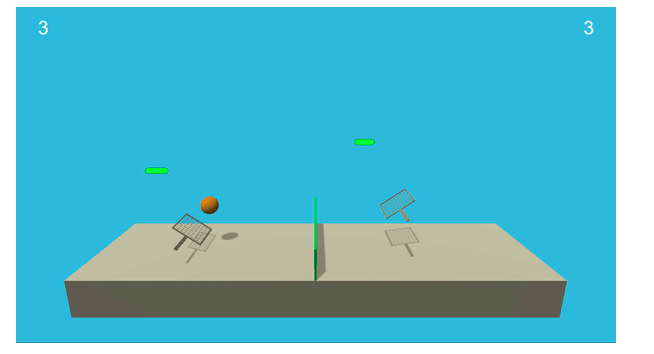
Multi Agent RL
Train two agents playing tennis against each other.

Autonomous-Robocar
Building and training an autonomous robocar driving along a test track.
Article
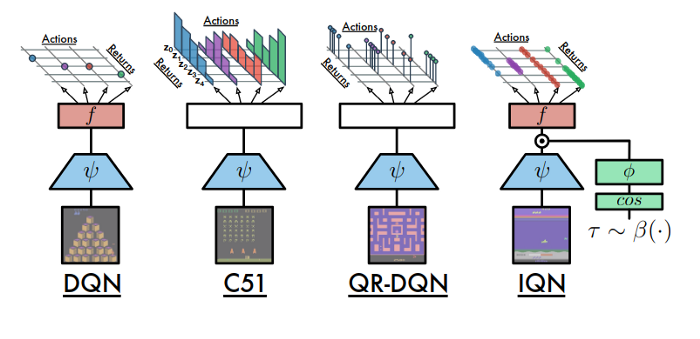
Distributional Reinforcement Learning — Part 2 (IQN and FQF)
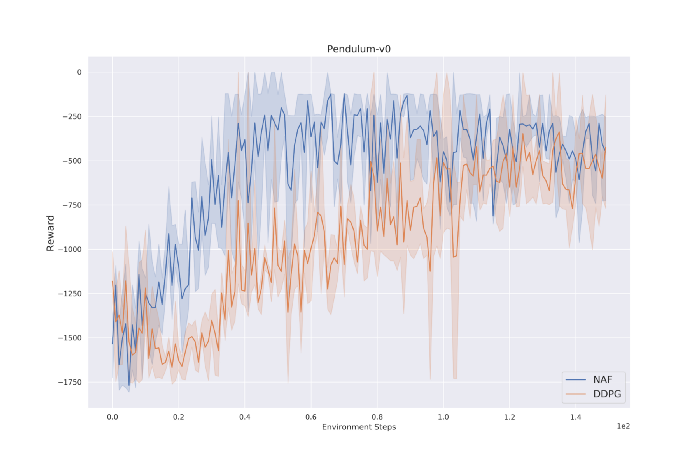
NAF: Normalized Advantage Function — DQN for Continuous Control Tasks
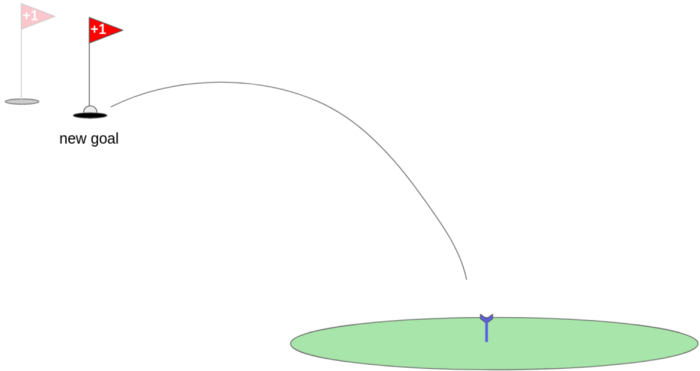
Advanced Exploration: Hindsight Experience Replay

Research Project Upside Down Reinforcement Learning
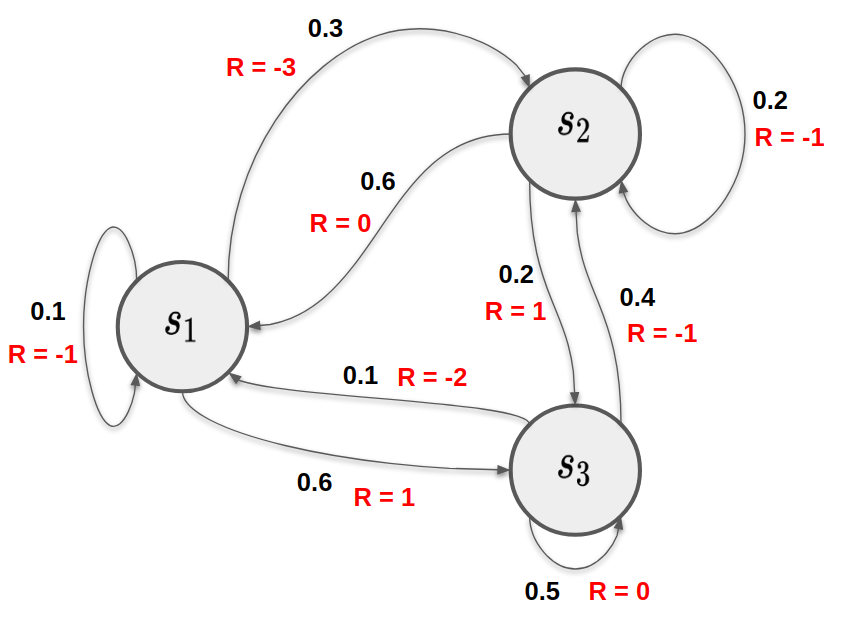
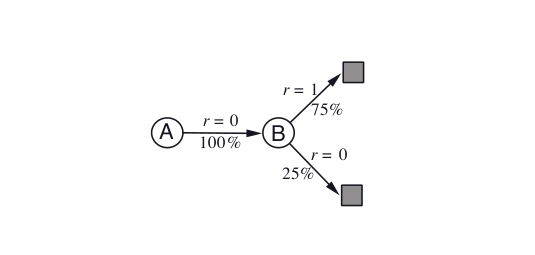
Reinforcement Learning and the Markov Decision Process
Explanation to the Markov Decision Process

Monte Carlo Methods - Part 1
Introduction to Monte Carlo Methods for Reinforcement Learning.
Temporal Difference Learning - Part 1
Explanation of Temporal Difference Learning in Reinforcement Learning.
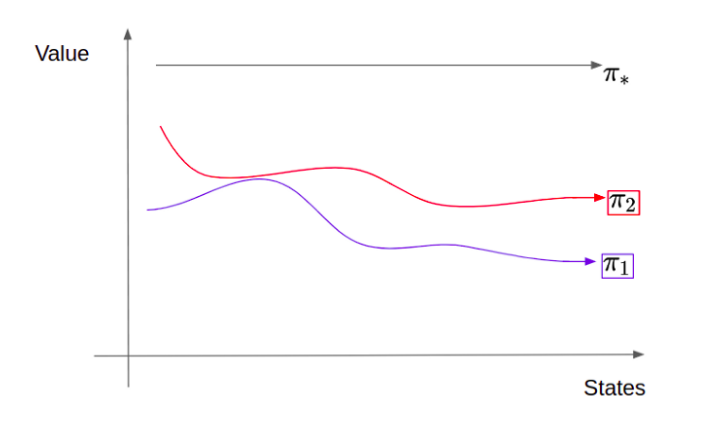
Policy and Value Function
Brief Introduction to Policies and Value Functions in Reinforcement Learning.